CURSOR partners present novel mono mechanism for miniaturized robots
CURSOR partners Tohoku University and SINTEF are going to present a new nono-wheeled flexible track capable of climbing high steps and adapting to rough terrains at the virtual IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) on November 4-6th 2020.
In regions prone to disasters, the instability of the ground and risk of collapse are the primary factors limiting rescue operations. For ensuring the safety and effectiveness of these operations, a remotely controlled search robot is desired.
Accordingly, projects are being conducted for exploring rapid and comprehensive rescue response by deploying a mass of small searching robots from aerial drones.
As the payload of drones is limited, the robots must be small and lightweight;however, mobile robots with high mobility on rough terrain typically possess complex structures and tend to be heavy.
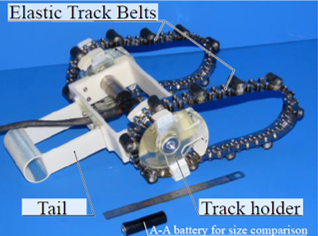
The novel mechanism with a simple structure and high mobility is composed of an elastic track belt, which deforms to adapt to irregular obstacles and is driven by a single sprocket. The system was evaluated and compared with a general wheel robot on the basis of its performance in step-climbing tests. The ratio of the maximum height climbed by the proposed mechanism to its wheel diameter is 145%, and its maximum height is 2.9 times than that achieved by the conventional robot. Furthermore, the results are superior when compared to those of the conventional continuous-track-type mechanisms. Overall, this method can be applied to any miniaturized robot that is required to possess high mobility on rough terrains.
Interested? Consult the full paper here.