The Approach
The CURSOR SaR Kit will deliver three fundamental improvements for search and rescue operations compared to already existing situation. It will reduce time needed for victim detection trapped in damaged buildings or under debris, increase localisation accuracy of those detected in such complex and dangerous environments and enhance reliability of detection and localisation information reaching the USaR crews operating in one or more worksites of urban areas, while reducing the time to create multi-sourced data fusion based operational picture improving the situational awareness
The project will generate the innovative CURSOR Search and Rescue Kit, which will include Soft Miniaturised Underground Robotic Finders (SMURFs) and different types of drones. The SMURFs are equipped with chemical sensors that allow to detect a wide range of chemical substances indicating human presence. They are carried from the operations headquarters to the disaster site by a transport drone. On site, the robots work independently in clusters searching for survivors. Additionally, the Mothership drone acts as an aerial hub that produces high-definition imaging for accurate visualisation of the disaster zone and allows communication with the control centre.
CURSOR SaR Kit will be designed in an open architecture approach allowing the integration of existing tools and technologies used by SaR teams today or developed by other research projects. The different components and platforms of the CURSOR SaR Kit follow the logic and sequence of standard USaR operational procedures. The figure below depicts the different components of the system, by clicking on the images you may read detailed explanation about the components and its role in the CURSOR SaR Kit.

Soft Miniaturised Underground Robotic Finders (SMURF)
This platform will carry innovative Volatile Organic Compound (VOC) sensors detecting volatile chemical markers of deceased and live humans in the rubble. In addition, a set of integrate COTS sensors will also be mounted on the SMURF complementing the VOC sensors detecting
Soft Miniaturised Underground Robotic Finders (SMURF)
This platform will carry innovative Volatile Organic Compound (VOC) sensors detecting volatile chemical markers of deceased and live humans in the rubble. In addition, a set of integrate COTS sensors will also be mounted on the SMURF complementing the VOC sensors detecting
Soft Miniaturised Underground Robotic Finders (SMURF)
This platform will carry innovative Volatile Organic Compound (VOC) sensors detecting volatile chemical markers of deceased and live humans in the rubble. In addition, a set of integrate COTS sensors will also be mounted on the SMURF complementing the VOC sensors detecting

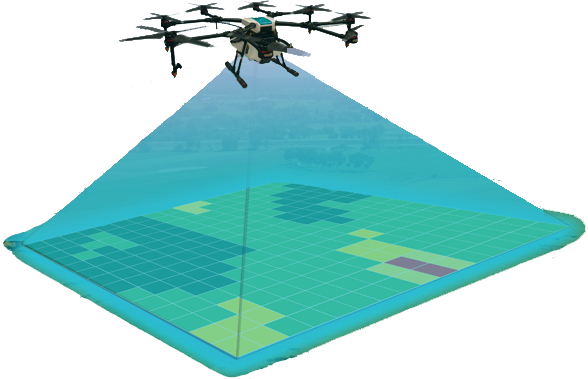
3D mapping drone
Providing disaster area scanning and mapping using advanced camera to improve situational awareness
3D mapping drone
Providing disaster area scanning and mapping using advanced camera to improve situational awareness
3D mapping drone
Providing disaster area scanning and mapping using advanced camera to improve situational awareness

Geophones
Geophones will be forming three arrays of minimum of three geophone units at scene detecting noise made by trapped people (knocking or voice) in shallow depth of rubble
Information management and decision support system
Information Management and Decision Support System fusing multiple source data integrating it into an aggregated operational picture, processing events, supporting decision making processes and data exploitation to relevant users according to their needs. The system will be implemented in the Command and Control Centre as well as in a mobile app to the worksite operators and commanders delivering an updated Common Operational Picture (COP) thus facilitating collaborative and coordinated work.

Communication and localisation component
CURSOR will include innovative localisation system and strategy of multiple miniaturized beacons and tags transmitting in multi-RF bands enabling localisation of equipment, operators and victims inside and on top the debris cone.
To transmit all the information collected by the sensors on site in a hostile environment CURSOR will rely on field communication system allowing rapid deploy communication in the disaster area command centre and in the worksite.

Mothership drone
Serving as a stationary communications drone, coordinating communication between drone-system and soft miniaturised robots

Transport drones
Will transport multiple number of SMURFs to the disaster site and drop them on the debris cone
Ground penetrating radar drone
Ground penetrating radar (GPR) drone will scan the disaster site to map the voids in the debris cone where poissible victims may be trapped.
The system will be tested by first responders of the consortium as well as by external practioners (e.g. INSARAG secretariat, Regione Liguria, USaR NL, Japan NRIFD) throughout the whole process of development: Starting with lab tests of the singular components in confined and controlled environment; followed by Small Scale Field Tests (SSFT) where the components will be tested against more realistic but limited scenarios. Partial integration of several components can be done at the SSFT stage to test the interfaces between the different parts of the system. Finally, the full integrated CURSOR SaR Kit will be tested in a full-scale Field Trial (FT) against a near to real life scenario. Both SSFT and FT will be carried out in two development cycles’ approach deriving conclusions from the first set of tests and trials of CURSOR SaR Kit V1 and implementing it the CURSOR SaR Kit V2 for the second cycle of testing.
The end foreseen result is the development of an easy and fast deployable SaR Kit of integrated technological components which directly responds to the FR needs. By providing an aggregated operational picture of the disaster scenario the collaborative work during the Search and Rescue operations by multiple agencies and teams can be better coordinated and the activities better prioritised. Therefore, the SaR Kit will significantly reduce the time to detect and localise trapped victims.