Workplan
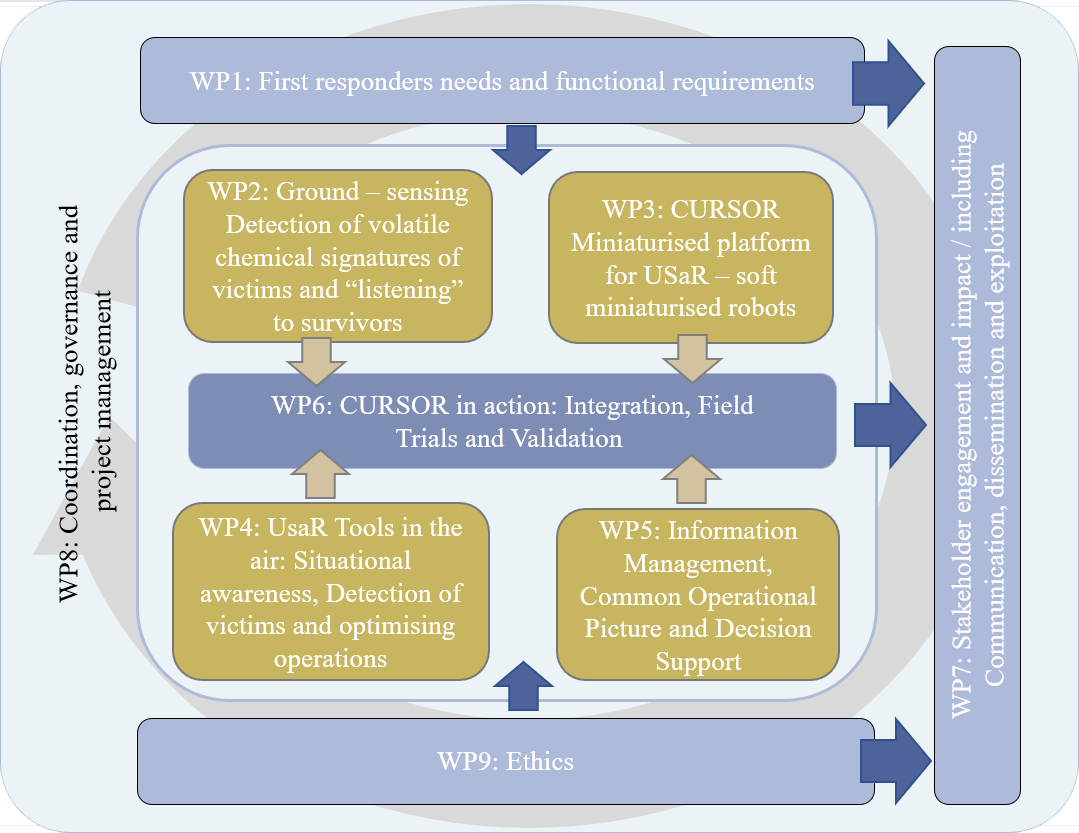
In order to achieve the set objectives and overall aim of the project, a collaborative working platform has been set, based on an on-going dialogue between practitioners and technical partners. Starting with the scenario and use cases definition leading into gaps analysis & technical requirements definition, followed by close support of the first responders throughout the components’ development phase and ending in testing of the CURSOR SaR Kit in two full scale field trials as part of the validation process. Internal exchange of information and experience between the partners is essential for the success of the project, therefore the technical partners and practitioners are supported by experts in different field (e.g. management, standardisation, ethics) aiming to increase the success of the project during and after its lifetime.
WP1
Content Here
WP2
Content Here
WP3
Content Here
WP4
Content Here
WP5
Content Here
WP6
Content Here
WP7
Content Here
WP8
Content Here
WP9
Content Here
Workpackage 1: First responders needs and CURSOR SaR Kit Architecture
Objectives of the Workpackage
The aim of the first workpackage is to collect and characterise the needs of first responders during Search and Rescue missions and based on these outcomes establish the technical specification and architecture of the CURSOR SaR Kit.
Workpackage Description
The first workpackage driven by first responders delivers the main guidelines and bases for further development of all the CURSOR SaR Kit components. First the CURSOR scenario will be defined together with use cases. Based on the chosen scenario, currently used technology in S&R missions will be identified. This allows further to determine the limitations and capability gaps of current technology and brings to the following step to identify the requirements for the innovative CURSOR SaR Kit.
All these different phases will be concluded with the establishment of the technical specification and architecture of the CURSOR SaR Kit – how and in what conditions the system should work, what kind of technical parameters are crucial for the first responders and what kind of user comfort is needed. Altogether the user expectations for the system performance will be set during this workpackage.
The results of this workpackage will be implemented in collaboration with the technical partners ensuring the relevance and representation of the operational requirements in the CURSOR SaR Kit.
Workpackage 2: Ground-sensing: Detection of volatile chemical signatures of victims and "listening" to survivors
Objectives of the Workpackage
The overall goal of this workpackage is to develop chemical sensing systems deployed on Soft Miniaturised Underground Robotic Finder (SMURF) platforms enabling to identify living versus deceased victims in a particular scenario, by identifying volatile organic chemical (VOC) markers of alive and deceased entrapped humans for use in urban search-and-rescue operations and developing an integrated array of chemical sensors, based on recent developments at CEA-LIST and UNIMAN, relying on specifically engineered Ligand Binding Proteins (LBP) used in nature to detect odorant molecules. This is in addition to selecting and integrating COTS sensors that will be complementary to the VOC sensors above in that they will detect other gaseous chemicals that are not addressed otherwise, including for instance CO2 from exhaled air and integrating those sensors into SMURF platforms with in-situ data processing and data transmission in hostile environments.
Workpackage Description
At an early stage in the project, this WP includes the identification, from literature search and from discussions with end-users, of chemical markers of human victims for use in urban search-and-rescue (USaR) operations. The main goal is to determine the chemical nature of compounds emitted in such events, the typical concentrations that can be encountered, and also the possible interfering species found in such hostile environments that could affect the measurements. The output from this work will be a database of chemical markers of human victims.
In order to detect the chemical markers identified above, chemical sensors will then be integrated onto SMURFs. Two types of sensors will be considered here:
- a sensor array targeting the chemical markers identified previously, developed throughout the CURSOR project and relying on previously developed technologies at UNIMAN and CEA-LIST. The sensors will rely on Ligand Binding Proteins (LBP) involved in nature in olfaction processes, as selective and sensitive coatings, and on gravimetric transducer technology
- a range of COTS sensors to detect other gases such as CO2, humidity or other small inorganic gases, which may also be of high interest for search and rescue but are not be detectable by the VOC sensor array mentioned above
The chemical sensors will be integrated into a miniaturised chemical detection sub-system, to be integrated later on in WP3’s developed SMURFs. The electrical and communication interfaces will be carefully defined, the physical space to be occupied and the placement of the chemical sensing systems in the SMURFs will be specified. A three level software will be developed in order to take care of sampling, output data processing from the chemical sensors using pattern recognition algorithms or fuzzy logic to extract chemical features of interest and data communication.
Finally, a new approach of using geophones around the worksite for locating the elastic waves source of a person tapping with a solid object will be investigated. This new approach uses small arrays of three geophones forming a triangle with a small distance from each other (less than 10cm) and a new high resolution (32bit) digitiser recently developed by WP2 partner C4Controls.
Workpackage 3: CURSOR Miniaturised platform for USaR – Soft miniaturised robots
Objectives of the Workpackage
The overall goal of this workpackage is to develop and prototype the Soft Miniaturised Underground Robotic Finder (SMURF) platform. A SMURF is a mobile, disposable, ground-based soft miniaturised robot equipped with a variety of sensing, actuation, communication and localisation components. It is developed to autonomously penetrate debris cones and piles of rubbles in search of victims, hence accelerating in an effective and cost-efficient manner rescue operations.
Workpackage Description
The SMURF platform is a component of the CURSOR SaR kit. This workpackage starts designing and developing the SMURF prototype considering the end user requirements and technical limitations. Several versions of the prototypes will be developed incrementally. The final version integrating all components will be manufactured in large numbers and tested during the full-scale field exercises.
In detail, the work in WP3 focuses on:
- Mobility of the SMURF, therefore it is designed to be able to drop, stop and move onto the debris cones trying to penetrate into the rubble
- Communication and localisation systems for each SMURF, since it needs to communicate with the other SMURFs to share sensor data it is collecting and to know its own position to reference the data it is collecting to a location
- Algorithm implementation of low- and high-level control algorithms for mechanical parts and of equipped micro-processing units for sensing, actuation, communication and localisation to assist the first responders in their search
- Integration of mechanical and electrical elements as well as sensing, actuation, communication and localisation components to ensure resilient and seamless operation in the harsh environment that first responders operate
- Prototyping the SMURF platform in two development cycles and manufacturing a final version to be used in the full-scale field exercises
Workpackage 4: USaR Tools in the Air: Situational Awareness, Detection of Victims and Augmenting Operations
Objectives of the Workpackage
The overall goal of this workpackage is to develop a drone-based system, assisting in the accelerated and cost-efficient detection and rescue of victims buried under rubble by generating a multi layered heat-map of the disaster area with successive layers of information for the disaster responders/rescue operators, transporting SMURFs to the disaster area with a fleet of electrically powered drones (Transport Drones), providing a Mothership Drone serving as a stationary communications drone, coordinating communication between drone-system and SMURFs. In addition to providing a Sensor Drone for (a) an on-board ground penetrating radar, (b) on board infrared sensor, video and geographic output information (in the format of 3D models) for centralised monitoring of the operation and ruggedising of all delivered mechanical and electronic components used in the open field (disaster recovery area).
Workpackage Description
The scope of the WP will cover few topics:
- Testing and ruggedisation of COTS drone sub-components against typical real world conditions, encompassing a safety mechanism for both operators and bystanders
- In addition, the WP will develop established LIDAR scanning or photogrammetry techniques in order to generate a 3D model of the disaster recovery area
- Based on previous steps, three drone types will be developed in two R&D cycles: mothership, transport & operational drones including the communication aspect, the carry on and dropping mechanism of the SMURFs, scanning ability and ground penetrating radar
- Both versions of the drones will be tested as part of the field trials, lessons learnt from V1 will be analysed to improve the V2 drones including photogrammetry component, with regard to its practical deployment under realistic conditions, lifting mechanism for the SMURFs and ground-penetrating radar capabilities
Workpackage 5: Information Management, Common Operational Picture and Decision Support
Objectives of the Workpackage
The objective of this workpackage is to develop and implement a wide range of functions in order to collect data and information coming from every source (such as robotic equipment, drones, geophones etc.). After the aggregation, data has to be exploited in a smart way so that first responders can benefit from and decide upon their actions faster and more efficient, as a result, development of more efficient algorithms is another objective of this workpackage. In addition, all information will be collected and visualised in the Command and Control application suite, therefore the coordination within teams at the worksite can be improved. Last but not least, another aim of this work package is to ensure communications at all times across platforms and among Search and Rescue teams.
Workpackage Description
First responders will operate in the field using the CURSOR SaR kit. This includes a vast variety of first sensors such as robotic equipment, drones and so on. The end goal is to locate and rescue a trapped victim. There is a series of events before this and everything starts with data generation by various sensors. Then, data has to be collected and processed. EXPER is the expert reasoning engine that will collect this data and exploit it in such a way so that only the correct and valuable information will reach the first responders. A special set of algorithms will be made to exploit the data and at the end, indicate the existence (probability) of a trapped victim at a given location.
In order to visualise the notifications and make the decision making easier and faster, an innovative Common Operational Picture function will be developed by another tool covered in this work package, the Command and Control tool. This tool will become the central, visual interface of the CURSOR SaR kit, featuring a “map-centric” architecture. The Command and Control tool will be available at the mobile command post and at the hands of the first responders providing them with real-time feedback in assessing the situation and deciding on the best course of action.
A disaster scene is a harsh environment with limited communication resources. Therefore, the last tool developed in WP5 will be the Emergency Gateway. This gateway will offer seamless interoperability and connectivity across all CURSOR platforms. It has to ensure that there is at least one communication channel available at all times making the information exchange between first responders always possible.
Workpackage 6: CURSOR in action : Integration, Field Trials and Evaluation
Objectives of the Workpackage
The aim of this workpackage is to validate the CURSOR SaR Kit concept of operation (components and the whole system) in realistic search & rescue conditions.
Workpackage Description
Different tasks are closely linked with each other and will target the achievement of the objectives of this workpackage:
- Set up an integration and validation plan
- Develop an effective and representative evaluation protocol and integrate it to the tests’ implementation
- To test the components as well as the whole system in lab conditions and during field trials.
- Develop and implement a training concept for understanding the system and to prepare first responders to use CURSOR SaR Kit
- Continuous knowledge capitalisation, regularly evaluation and lessons learnt of the field trials
The outcome of this workpackage is a evaluated and tested CURSOR SaR Kit including training and information material for first responders. Additional outcome is the lessons learnt protocol which draws together the experiences gathered during the field tests.
Workpackage 7: Stakeholder engagement and impact / including Communication, dissemination, exploitation, standardisation, Ethics and Data Management, IPR
Objectives of the Workpackage
CURSOR will develop innovative and ground-breaking technologies as well as knowledge base regarding training and analysis of trials. To make this knowledge accessible and have the project creating an impact not only during its lifetime but also after, WP7 was created focusing on creating strong dissemination and communication strategies as well as innovation management to make sure the results of the projects are sustainable.
Workpackage Description
To achieve this overreaching aim of raising awareness about the project and its results and engaging discussions with potential users, policy makers and research community the project will persue few activities under WP7:
- To create a network by forming relationship and establishing communication channels with the different stakeholders to progressively enable them to act in their respective spheres. For that the project has developed a stakeholder engagement strategy as part of its dissemination and communication plan
- Develop tools to support the dissemination and communication efforts such as: public website, press releases, memorable visual identity, social media channels etc
- Development of a structure platform for knowledge management following both GDPR guidelines and the project’s Data Management Plan
- Development of an exploitation plan (and a business plan for the CURSOR SaR Kit) that will ensure the high impact of the project and its results after the lifetime of the project. The dissemination strategy will support the exploitation objectives delivering the requested outcome. An Innovation Management Board has been set up to follow up the plan and related activities, as well as develop IP protection approach.
- CURSOR SaR Kit developments relies greatly on the input of practitioners, therefore as part of the project dissemination objective, multiple workshops including a final conference will be held. Presenting the solution, results from field trials and steering discussions about the CURSOR SaR Kit and its possible acceptance by the first responders’ community
- Last, to create a sustainable impact, the project would strive to affect existing standards and create new ones as a result of the R&D work carried out by the project partners and the lessons learnt out of testing the technologies
Following these activities described above, the project will increase its impact in the practitioners’ community creating a change in SaR teams work leading to a better assessed, managed and executed SaR missions. The aim is to create a change in multiple levels from the operator to the policy makers, from national SaR teams to FR international organisations e.g. INSARAG.
Workpackage 8: Coordination, Governance, Project Management
Objectives of the Work Package
The objective of this workpackage is to provide leadership, governance, legal & ethical supervision, technical coordination and management support to CURSOR. It encompasses contractual issues, administrative, financial and communication inside the project and external relationships.
Work Package Description
This workpackage’s aim is to ensure effective planning, implementation, coordination and realisation of the project activities. In order to reach the goals of this workpackage, the establishment and management of following activities are crucial:
- Communication within the consortium and EC
- Risk management
- Provision of decision support for the consortium
- Exploiting project related opportunities
- Involving First Responders Board (FRB)
The Project Management Handbook will be put together and will provide standards for the quality assurance, communication, reporting and dissemination activities.
Workpackage 9: Ethics requirements
Objectives of the Work Package
The project due to the involvement of first responders testing the technology and the data collection activities carried out, is obliged to comply with certain ethics requirements guarding the safety and privacy of research participants and the data storage and handling.
Work Package Description
The WP will assess aspects such as:
- Recruitment of search participants and their consent to take part in the project activities, providing feedback, sharing from their experience and evaluating the CURSOR SaR Kit and its components
- Developing procedure on data collection. Processing and storage to secure data safety and privacy measures are addressed
- Making sure that only relevant information to the research is collected thus adhering to the minimum data administration principle
These measures will ensure high ethical standard in the project that conforms with the EC recommendations.